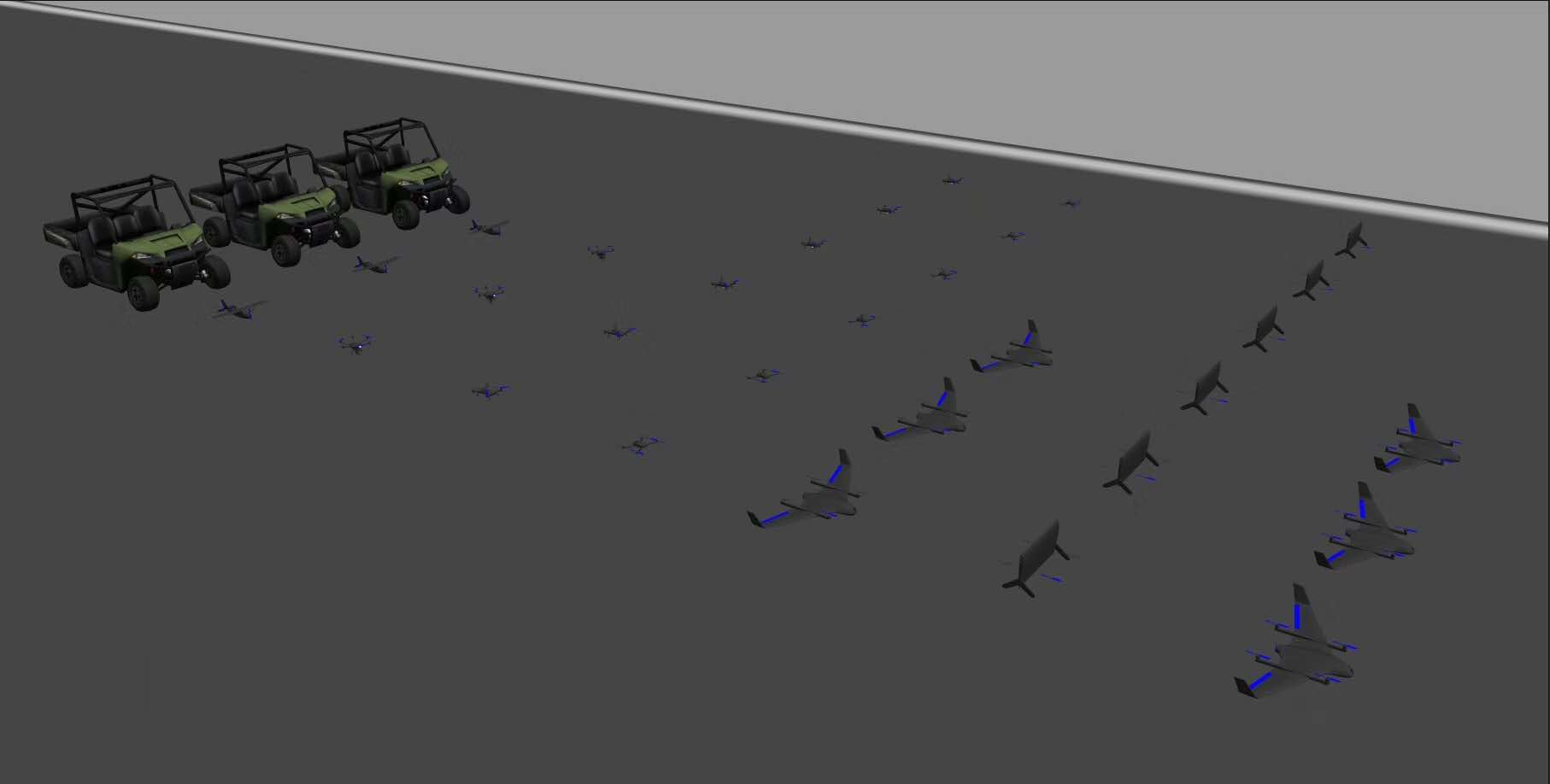
XTDrone是基于PX4、ROS与Gazebo的无人机通用仿真平台。支持多旋翼飞行器(包含四轴和六轴)、固定翼飞行器、复合翼飞行器(包含quadplane,tailsitter和tiltrotor)与其他无人系统(如无人车、无人船与机械臂)。在XTDrone上验证过的算法,可以方便地部署到真实无人机上。
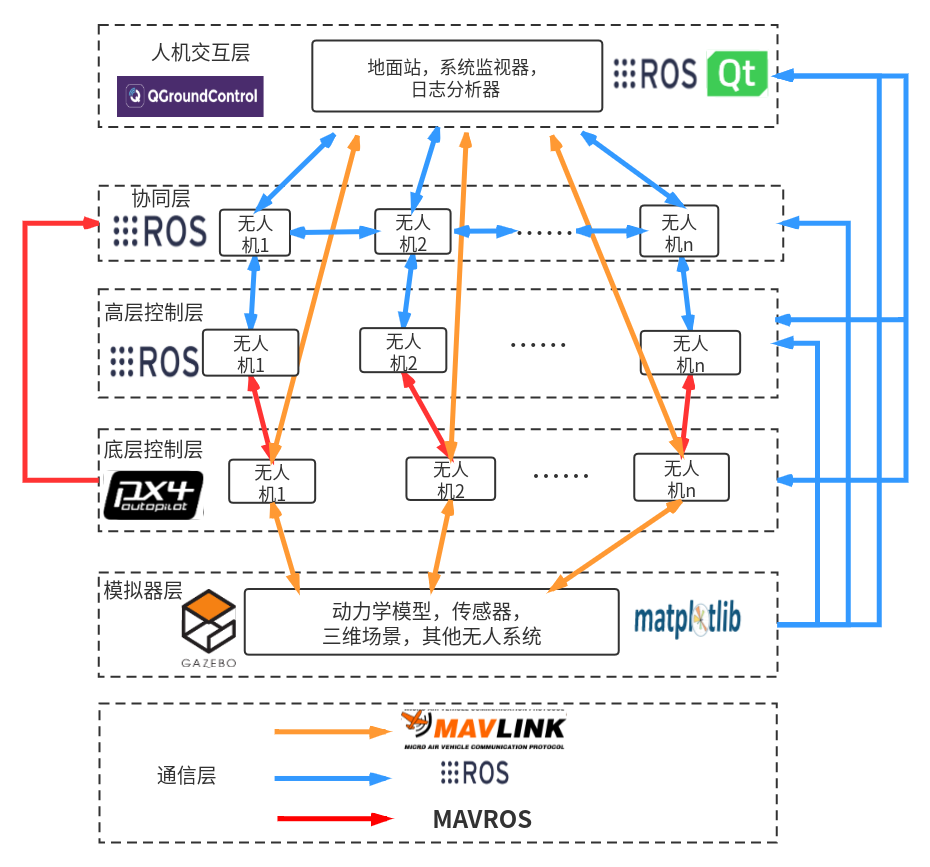
单机仿真架构如下图所示,详见论文
K. Xiao, S. Tan, G. Wang, X. An, X. Wang and X. Wang, "XTDrone: A Customizable Multi-rotor UAVs Simulation Platform," 2020 4th International Conference on Robotics and Automation Sciences (ICRAS), 2020, pp. 55-61, doi: 10.1109/ICRAS49812.2020.9134922.
如果使用XTDrone用于学术论文的仿真验证,请引用上述的其中一篇论文。
在这个平台上,开发者可以快速验证算法。如:
双目SLAM
视觉惯性导航
视觉稠密重建
2D激光SLAM
3D激光SLAM
2D运动规划
3D运动规划
集群运动规划
目标检测与追踪

多机编队

多机精准降落
固定翼
复合翼
无人车
无人船
空中机械臂
开源地址:https://gitee.com/robin_shaun/XTDrone
关注【格子开源栈】回复AI,获取神秘礼包!
 售前咨询专员
售前咨询专员
